Genie Sim Benchmark: The Ultimate Tool for AI Robotics Simulation and Evaluation
Breakthrough Innovation in Embodied AI Testing
In the innovative journey of intelligent robotics, we continue to break boundaries and lead industry trends. Following the milestone open-source release of the million-scale real machine dataset “Agibot World” and the launch of the first general-purpose embodied foundation model “GO-1,” we persist in driving technological innovation. Today, the AgiBot World community officially welcomes a new member — Genie Sim Benchmark. As an open-source evaluation version of Genie Sim, it focuses on providing precise performance testing and optimization support for embodied AI models. The addition of this new member marks an important step in our construction of an open, collaborative intelligent robotics ecosystem.
Open Source Resources for Global Developers
Open Source Project Links:
- GitHub: github.com/AgibotTech/genie_sim
- Hugging Face: huggingface.co/datasets/agibot-world/GenieSimAssets
- Project Homepage: agibot-world.com/sim-evaluation
Powered by NVIDIA Isaac Sim platform’s highly realistic visual rendering and precise physics engine, Genie Sim accurately reproduces robot operating environments, providing a standardized automatic evaluation system for diverse tasks. It measures model performance across various scenarios, accelerates algorithm iteration processes, and simultaneously reduces model evaluation dependence on expensive physical hardware, significantly lowering testing costs.
The release of Genie Sim Benchmark undoubtedly provides developers with a powerful tool, representing a leap forward in simulation evaluation. With the open-sourcing of Genie Sim Benchmark, the AgiBot World community will offer developers a complete solution from data collection to model training and simulation evaluation. Next, let’s explore how Benchmark can become an accelerator in the robot development journey!
How Does Genie Sim Benchmark Empower Developers?
Comprehensive Asset Library at Your Fingertips
Through close collaboration with Guanglun Intelligence, Genie Sim has built a large-scale, high-precision embodied intelligence 3D asset library, forming a complete simulation system covering rich objects, scenes, and robot models. All assets are created using meticulous manual modeling, 3D reconstruction, and generative AI (AIGC) technologies, ensuring high realism while balancing diversity and asset generation efficiency to fully meet the simulation evaluation needs of complex robot operation tasks.
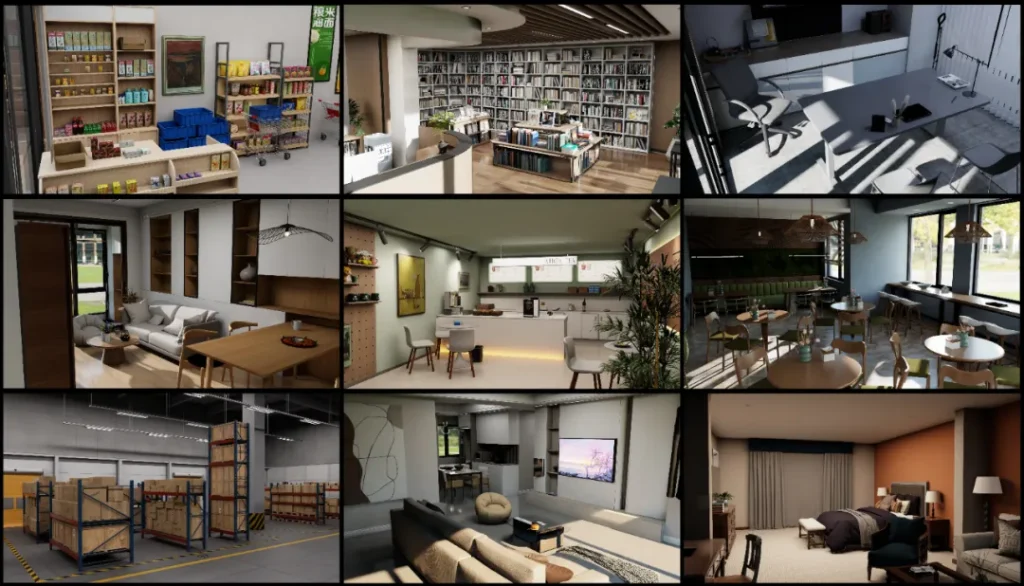
High-fidelity 3D simulation assets are costly to build, and the professional modeling and rendering optimization threshold makes many research institutions and individual developers hesitant. For this reason, today we officially open-sourced 500+ carefully selected high-fidelity 3D assets in the Hugging Face community. These quality assets cover five core domains including home, factory, and commercial supermarkets, containing rich scenes and detailed interactive objects, fully compatible with mainstream simulators, supporting one-click deployment.
This is our heavyweight gift to the simulation open-source community:
✅ Save production costs — directly reuse quality simulation assets verified in production
✅ Break through technical barriers — conduct high-precision simulation without a professional art team
✅ Accelerate R&D iteration — focus on core algorithm development with ready-to-use asset libraries
Realistic Environments Within Reach
Genie Sim provides high-fidelity, high-precision simulation evaluation environments based on scene reconstruction, covering various scenarios and objects, highly replicating the real world. Genie Sim is like a versatile simulator that can build “virtual reality,” covering five core scenarios from home to industrial, from catering to commercial supermarkets and offices, fully meeting typical application needs of robots in production and life.
Genie Sim’s simulation evaluation environment can simulate conditions and variables affecting algorithm performance in the real world, providing highly realistic test benchmarks for model evaluation. Through comparative verification, the GO-1 model simulation test results differ from real machine results by less than 5%. This breakthrough in simulation precision comes from completely 1:1 restoration of real test environments and interactive objects in the simulation environment, precise calibration of chassis, joints, and end dynamics with real machines, and quantitative benchmark verification and iteration of model inference consistency between real machines and simulations across dozens of operation tasks, each with hundreds of tests.
Algorithm developers can highly trust model evaluation results in simulation, greatly reducing the number of real machine tests. Using Genie Sim can improve algorithm iteration efficiency by more than 5 times, reduce testing costs by 95%, and help R&D teams focus on core algorithm optimization.
Diverse Tasks, Comprehensive Coverage
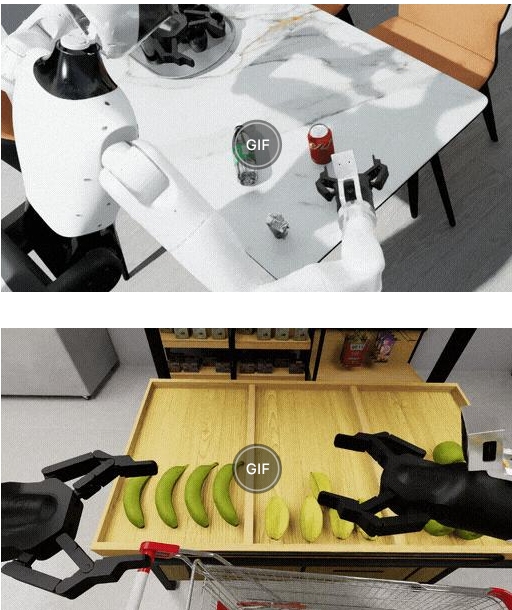
Genie Sim Benchmark has established a comprehensive simulation benchmark and standardized evaluation system, supporting automatic evaluation of diverse operation tasks from basic to advanced. Whether heating food in a microwave in the kitchen or organizing items in the living room, Benchmark can handle it all, providing precise evaluation and feedback, truly a “hexagonal warrior” in the simulation evaluation world. It’s like having an all-purpose tool that allows you to evaluate model performance in various scenarios without site and cost constraints, helping developers quickly validate algorithm performance and optimize models.
Genie Sim Benchmark has open-sourced more than ten high-difficulty diverse evaluation tasks, with all code fully opened on GitHub. The open-source repository not only includes standardized test scenarios, supporting users to directly call evaluation tasks to verify algorithm performance; it also supports developers for flexible customization. Users can quickly build new scenarios based on the 500+ high-fidelity object asset library and customize evaluation steps and metrics through the evaluation system. This provides full-process support from rapid verification to detailed evaluation for algorithm R&D, significantly improving development efficiency.
VR Remote Operation, Precise Control
Imagine, with just a VR device or keyboard, you can become a robot “commander,” controlling robots to complete complex tasks, observing and adjusting operations in real-time. Every action of the VR controller can remotely operate robots in the simulation environment in real-time, controlling the robot’s arms, waist, and chassis movement. The most ingenious part is the mechanical arm control—the simulation system achieves precise robot operation following through inverse kinematics algorithms, completing smooth remote control.
Based on simulation remote operation functions, users can flexibly call the open-source simulation asset library to quickly build personalized virtual data collection environments, easily collect high-quality training datasets according to actual project needs, providing high-quality and rich data support for algorithm optimization, compensating for real data collection defects.
Flexible Configuration, Easy to Use! Genie Sim Makes Everything Simple!
Genie Sim’s interface is concise and intuitive, with flexible configuration. Developers can customize the simulation evaluation process according to specific needs, and even beginners can quickly get started. From configuring task templates to selecting scenes to setting evaluation standards, each step is intuitive and easy to understand, requiring no complicated configuration to start the simulation journey!
Come and experience how Genie Sim Benchmark efficiently empowers your development process, making model evaluation efficiency “off the charts”!
Quick Start Guide: Three Simple Steps to Model Evaluation
Through the detailed introduction above, you likely have a comprehensive understanding of Genie Sim Benchmark’s features and complete configuration process. However, in actual project development, engineers often need a more lightweight verification method to quickly assess the tool’s compatibility with the project.
For this purpose, we’ve distilled a ready-to-use Demo showing how to complete a model evaluation in three simple steps and view real-time rendering effects. Simple, quick, and efficient, Genie Sim Benchmark makes simulation evaluation effortless!
1. Start the Genie Sim server